技術資料集
動作原理
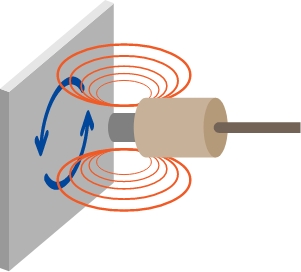
GAP-SENSOR は一般的に「渦電流式変位センサ」と呼ばれるものです。センサヘッド内部のコイルに高周波電流を流し高周波磁界を発生させています。
この磁界内に測定対象物(導電体)が近づいた時、測定対象物表面に渦電流が発生しセンサコイルのインピーダンスが変化します。
この現象による発振強度の変化を利用してこれを高周波検波し、変位対電圧の関係を得ています。
測定対象材質・寸法・形状について
材質による出力特性
ギャップセンサーは測定対象物が金属であれば動作しますが、材質により感度や測定範囲は異なりますのでご注意下さい。
測定対象物の寸法
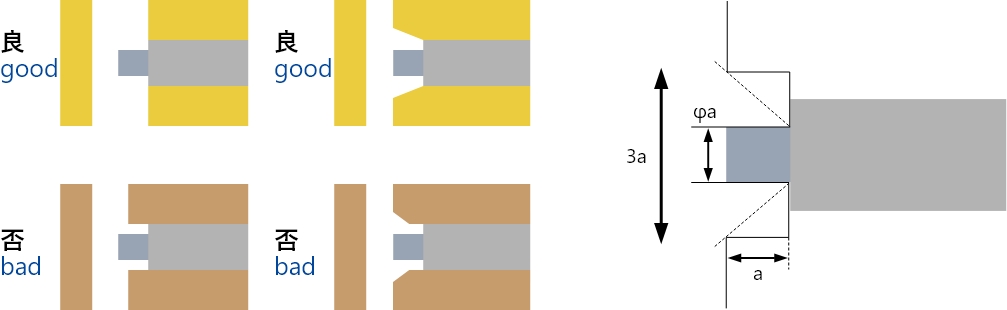
測定対象物の大きさはセンサコイル径の3倍を有する事を推奨します。
測定対象物の面がそれ以下の場合は感度が低下します。また測定対象物が粉末・積層断面・線束のような場合にも感度低下し、測定不可となる場合もあります。
測定対象物の厚み(PU-05基準)
測定対象物の厚みは、鉄(SCM440)で0.2mm 以上、アルミ(A5052P)で0.4mm 以上、銅(C1100P)で0.3mm 以上を推奨します。
測定対象物の形状
測定対象物が円柱(シャフト)の場合、センサコイル径に対し、円柱の直径が3.5 倍以上あれば影響ありませんが、1:1の場合は感度が約70%に低下します。
RUN-OUT 現象について
軸振動測定の場合、RUN-OUT 現象と呼ばれる真値以外の出力が表れることがあります。対象面の傷、凹凸、楕円、偏心等から発生するMECHANICAL RUN-OUT は対象面の修正研摩により防止できます。
磁性体、特に鋼製の軸振動を測定する際のELECTRICAL RUN-OUT は、その発生原因が単一でなく、主原因は鋼材の残留磁気、結晶構造の不均一、軸表面の焼入硬度のバラツキ等が考えられています。測定目的によっては下記の対策が必要な場合があります。
- 測定軸に対する加工後の脱磁
- 測定軸に対する圧縮応力を低減する
- 測定軸に対し、測定円周囲の銅鍍金、及び研摩
- 測定対象物を銅等の材質へ変更する
センサの設置状況について
センサの周囲環境について
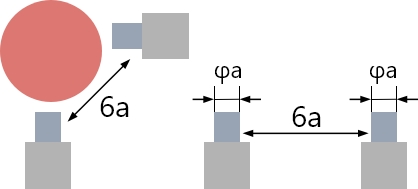
センサの受感面の周囲に測定対象物以外の金属が近接している場合、またはセンサを金属部位へ埋め込む場合は下図の様に金属部を受感面から十分離すようにして下さい。
注)PFシリーズについてはこの限りではありませんのでお問い合わせ下さい。
※画像をクリックして拡大表示
センサの相互干渉について
※画像をクリックして拡大表示
多チャンネルにて同時計測の場合、同一型のセンサを近接して取りつけますと互いに干渉して測定結果に誤差を生じることがあります。干渉しない距離(通常センサ径の6倍)まで離して設置するか、タイプの異なる組合せでご使用頂くか、干渉防止タイプの変換器をご利用頂くことを推奨しますので、お問い合わせ下さい。
不感帯(α0)について
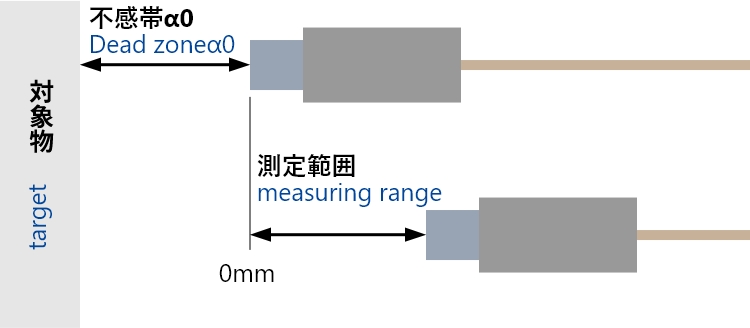
GAP-SENSOR(一部機種を除く)には不感帯(α0)が発生します。 不感帯とは、センサと測定対象物の間でセンサの出力特性が、直線的に伸びない分の距離を表します。弊社のカタログに記載されている測定距離はα0を加算した状態で0mmとしています。
※画像をクリックして拡大表示
出力の調整
ギャップセンサは測定対象物の材質や形状により、出力特性が一定ではありませんが、感度調整をすることでセンサの性能を最大限生かして使用することが可能です。
調整ボリュームの配置

※画像をクリックして拡大表示
55 型 / 76 型 変換器
変換器上面の蓋を外した内部に調整ボリュームを配置しております。
MS型変換器
変換器前面にGAIN,ZERO(SHIFT),LINEARの調整ボリュームを配置しております。
センサの機種により、背面のSELECTボリュームを調整して、ご使用するセンサに合わせて調整してください。
55HFL型/ 37型/ CFC型変換器
端子台の反対側に調整ボリュームを配置しております。
ギャップセンサ調整手順(55 シリーズ基準)
※画像をクリックして拡大表示
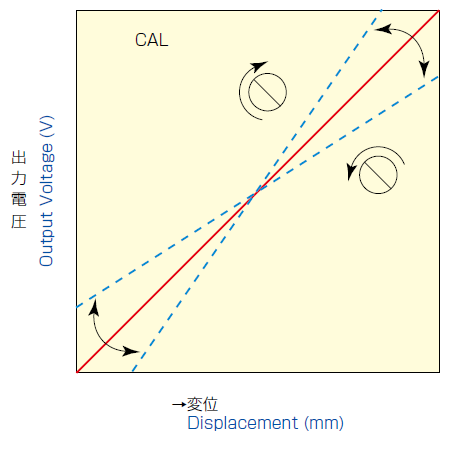
CAL(GAIN)
変位に対する出力電圧を可変する感度調整ボリュームで、換算しやすい電圧値に設定することが可能です。
※画像をクリックして拡大表示
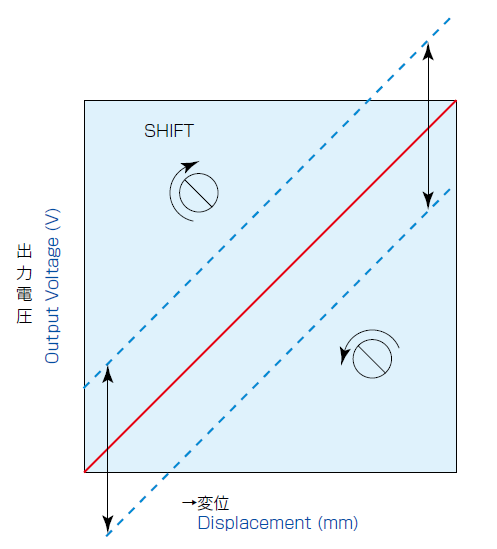
SHIFT(ZERO)
感度を変えることなく出力電圧のシフト調整を行うことが可能です。
※画像をクリックして拡大表示
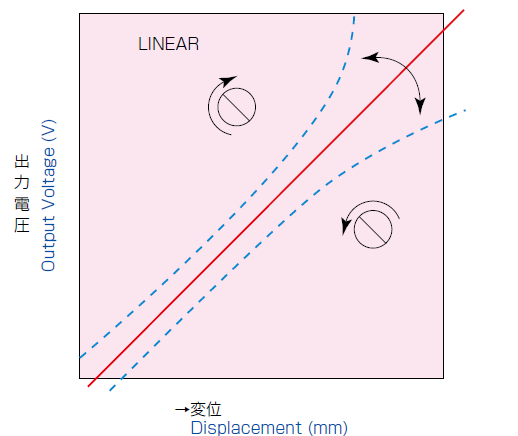
LINEAR
出力特性の直線性を補正するもので、このリニア調整をしますと、感度及びシフトの再調整が必要です。
調整手順(測定対象が鉄の場合)
※不感帯は下表のセンサ仕様一覧(簡易版)をご確認ください。
※調整電圧値は直線性の範囲内としてください
※フルスケールとはセンサの最大測定範囲を示します(例:PU-05の場合2㎜)
※下記調整手順は校正対象が鉄の場合を想定しています。
0〜5V 出力タイプ(55015/5502A/5503A)(55MS-S)
- センサ表面と測定対象物表面から不感帯を空けた地点を0mm にしてSHIFT で0V に調整
- センサ表面と測定対象物表面の距離を1/2 フルスケールにしてGAIN で1/2 フルスケール電圧に調整
- センサと測定対象物間のギャップをフルスケールにしてLINEAR でフルスケール電圧に調整
- LINEARを動かしたらSHIFT、CAL調整時の各ギャップで電圧値を確認し、直線性の範囲外の電圧値の場合は最初の⼿順から再調整。最終的にLINEARを動かさなかったら終了
± 5V 出力タイプ
(5505/5507/5509/5514/5520/5530/5540)
(55MS-M/55MS-Z)
- センサと測定対象物表面から不感帯を空けた地点を0㎜とする。
- センサ表面と測定対象物表面の距離を1/2 フルスケールにしてSHIFTで約0Vに調整
- センサ表面と測定対象物表面の距離を1/4フルスケールにしてGAINで約-2.5Vに調整
- センサ表面と測定対象物表面の距離を3/4フルスケールにしてLINEARで約+2.5Vに調整
- LINEARを動かしたらSHIFT、CAL調整時の各ギャップで電圧値を確認し、直線性の範囲外の電圧値の場合は最初の⼿順から再調整。最終的にLINEARを動かさなかったら終了
1~5V出力タイプ
- センサ表面と測定対象物表面から不感帯を空けた地点を0mm とする
- センサ表面と測定対象物表面の距離を1/8フルスケールにしてSHIFTで約1.5Vに調整
- センサ表面と測定対象物表面の距離を1/2フルスケールにしてCALで約3Vに調整
- SHIFT⇔CALを確認し、それぞれ規定の電圧値に合うまで繰り返して調整する
- SHIFT⇔CAL の調整が完了したらLINEARを調整する
- センサ表面と測定対象物表面の距離を 7/8フルスケールにしてLINEARで約4.5Vに調整
- 再度SHIFT⇔CALの電圧値を確認し直線性の範囲内で調整を⾏う
- 再度LINEARの電圧値を確認し、直線性の範囲内であれば完了。範囲外であれば、再度SHIFT⇔CAL、LINEARの調整を繰り返す
| ギャップ | 出力 | 調整ボリューム |
| 0.3㎜+0.1㎜ | 1.5V | SHIFT |
| 1.2㎜+0.1㎜ | 3.0V | CAL |
| 2.1㎜+0.1㎜ | 4.5V | LINEAR |
センサ仕様一覧(簡易版)
| センサ型式 | 出力電圧(V) | 測定範囲(鉄)(㎜) | 不感帯(a0)(㎜) |
| PU-01 | 0~1.5 | 0~0.15 | 0 |
| PU-015A | 0~3 | 0~0.3 | 0 |
| PU-02A | 0~2.5 | 0~0.5 | 0 |
| PU-03A | 0~5 | 0~1 | 0 |
| PU-05 | ±5 | 0~2 | 0.05 |
| PU-07 | ±5 | 0~3 | 0.1 |
| PU-09 | ±5 | 0~4 | 0.2 |
| PU-14 | ±5 | 0~6 | 0.3 |
| PU-20 | ±5 | 0~8 | 0.4 |
| PU-30 | ±5 | 0~12 | 0.6 |
| PU-40 | ±5 | 0~16 | 0.8 |
| PF-02 | 0~2.5 | 0~0.5 | 0 |
| PF-03 | 0~5 | 0~1 | 0 |
| DPU-10A | ±5 | 0~5 | 0 |
| DPU-20A | ±5 | 0~10 | 0 |
| DPU-30A | ±5 | 0~15 | 0 |
| DPU-40A | ±5 | 0~20 | 0 |
| S-06 | 1~5 | 0~2.4 | 0.1 |
| S-10 | 1~5 | 0~4 | 0.1 |
用語解説
分解能
測定対象物が静止時でも、変換器内部の残留ノイズにより電圧の微妙な変化を生じています。このノイズが少ないほど分解能が優れ測定精度が良いという事になります。弊社ではセンサ測定距離のハーフスケール点でこのノイズの大きさを測定し、変位換算により分解能と表記しております(カタログの数値は当社電源を使用)。
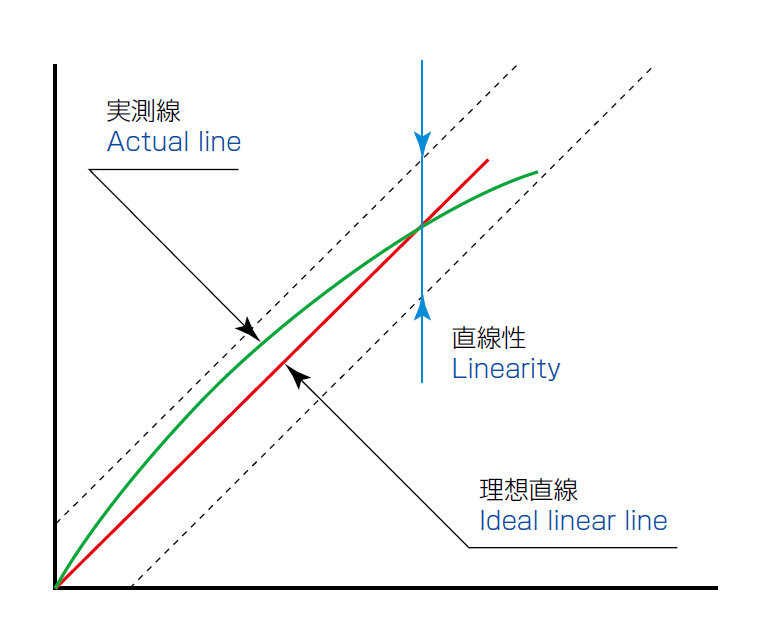
直線性
※画像をクリックして拡大表示
変位センサの出力電圧は距離と比例の関係となりますが、実測値は理想直線に対してズレが生じます。このズレが理想直線に対してどの程度であるかをセンサのフルスケールに対して%表示で表記しております(カタログ表記は室温時)。
測定範囲
センサが測定対象物を測定できる範囲を示します。測定対象物からセンサまでの距離と電圧出力の関係が比例した状態を表記しております。本センサの特性上、表記の測定範囲外でもセンサの感度変化を捉えて測定することが可能です(カタログ表記は測定対象物が鉄の場合)。
周波数特性
測定対象物の振動・変位・回転の速度に対して、センサでの測定が可能な速度範囲を周波数帯域で表記したものです。
温度特性
周囲温度が変化した場合に、センサの感度が変化します。この変化を温度ドリフトと言います。1℃に対する変化量を表記しております。PFシリーズは弊社製品群でもっとも温度ドリフトの少ないセンサとなっております。